Freiburg-Alicante Rotokite Project
The Freiburg-Alicante Rotokite Project is a joint research effort by Freiburg University’s System Control and Optimization Laboratory (syscop) and the Alicante-based Spanish company SomeAWE labs. The project's long term aim is to design, build, and control a small scale demonstrator for a novel way to generate wind power based on wind driven rotokites. The electrical power is generated in a ground based motor-generator that is connected to the rotolkite via a thin tension cable, or tether. It operates in a cyclic fashion, going through two phases: a reel-out power generation phase with high tether tension, and a reel-in phase with low tether tension, which are explained in the following illustration:

The rotokite generates electric energy by performing a 'pumping' cycle.
The tension variations are achieved by changes in the collective pitch of the rotorblades, while the stability of the rotokite depends on accurate feedback control of the cyclic pitch, i.e., angle of attack variations that vary with the rotation frequency and allow the kite to move left or right or up or down. Most of the work in the early phase of the project is related to the control of the cyclic pitch, which requires work on suitable sensors, actuators, and control mechanisms.
The project itself is currently unfunded but supported by the enthusiasm of its members. It also profits from the base financing of the German university group, synergies with related research projects such as the DFG funded project MAWERO on multi-wing airborne wind energy systems, and the private capital of the Spanish company. The project partners offer multiple opportunities for participation of students from all study programs at Freiburg's Faculty of Engineering as well as the Department of Mathematics, preferably in the form of master theses, but also in the form of Bachelor theses or study projects, with academic supervision by Prof. Diehl and some of his team members. Differential Equation Modelling, Simulation, Control, and Optimization play a major role, and a strong mathematical and programming background are beneficial, as well as prior attendance of the respective lectures offered by the team (Modelling and System Identification, Numerical Optimization, Wind Energy Systems, ....). Also embedded microcontroller programming and general technical knowledge and maker skills are very valuable. The simulation work will mostly be performed in Freiburg. The experimental work will mostly be performed in Alicante. All travel related costs, including air travel and accomodation and a monthly allowance of EUR 300 while in Alicante, would be covered by the Spanish company someAWE Labs. Below we give some links and information on the participating scientists as well as some recent thesis results for inspiration. If you want to participate in the project, please contact Prof. Diehl or his PhD student Jakob Harzer, ideally directly providing your CV and transcript of records and a statement of which areas of expertise you could bring into the project and on which topics you would like to work and skills you want to learn or to deepen.

Left: The experimental setup in action, Right: Rotokite project members from Freiburg (F) and Alicante (A) as of June 2022, from left to right: Jakob Harzer (F), Daniel Unterweger (F/A), Jochem De Schutter (F), Christof Beaupoil (A), Moritz Diehl (F).
SomeAWE Labs
[Thesis, Dec. 2023] - Antonia Mühleck: A Dynamic Wake Model based on Vortex Rings for Airborne Wind Energy Systems
Abstract: As with conventional wind turbines, the energy yield of Airborne Wind Energy Systems (AWES) is reduced by wake effects. Due to the dynamic trajectories of AWES, steady-state assumptions do not apply. A dynamic model is therefore required to better understand the aerodynamic wake of AWES and to minimise losses caused by it.
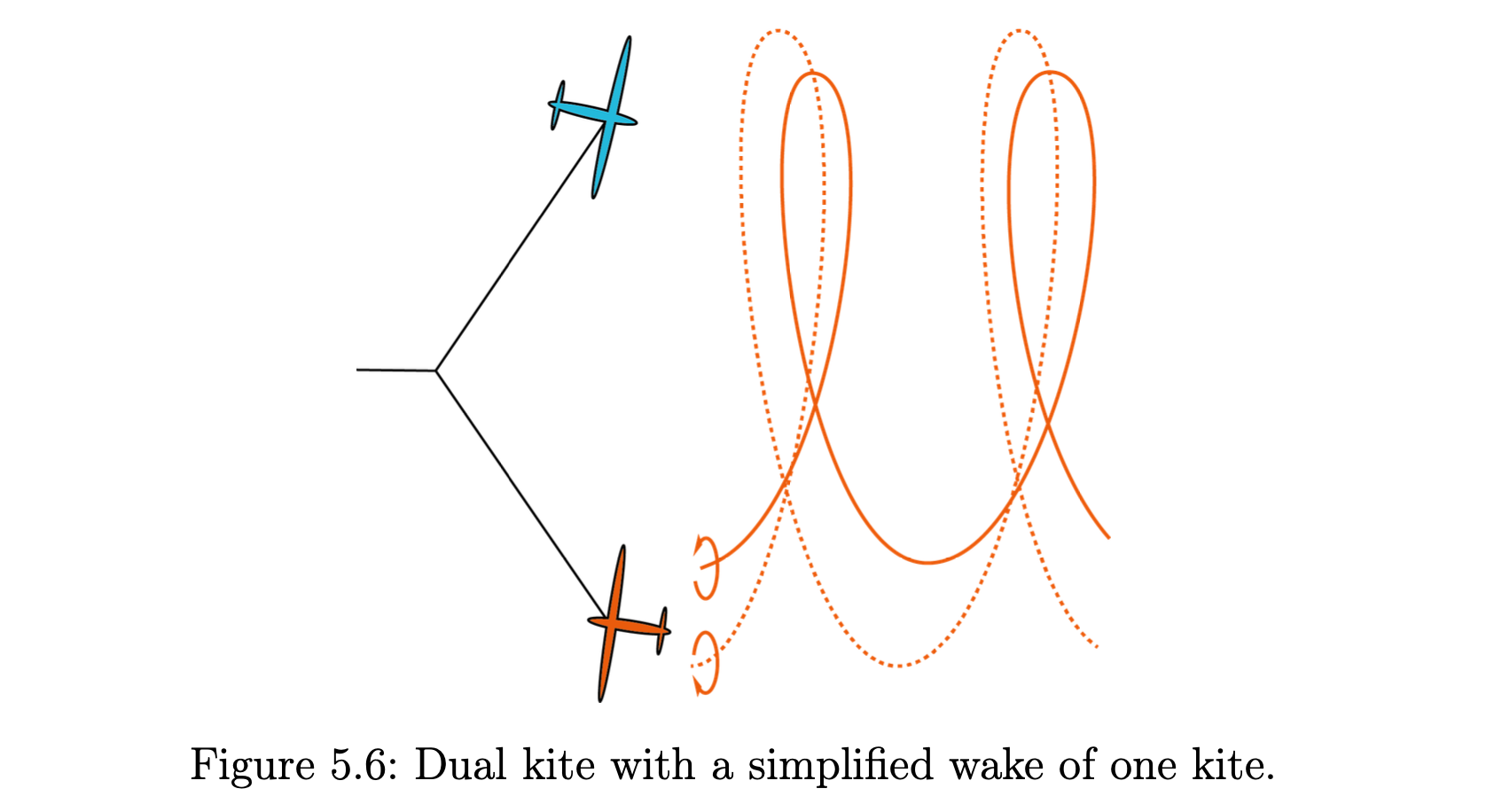
The aim of this thesis is to derive a dynamic but numerically inexpensive model for the wake of single and dual kite crosswind AWES flying on circular trajectories. As angular velocities are very high in crosswind flight, gravitational forces are assumed to be negligible compared to centrifugal and aerodynamic forces. If wind shear is neglected as well, the problem becomes axisymmetric about the free-stream wind direction. The wake can then be represented in a simplified form by a sequence of vortex rings. Using the Biot-Savart-Law, the induced velocities of these rings at the kite’s position are evaluated. The resulting integrals are replaced by an expression with elliptic integrals. These can be evaluated via power series, thus reducing the computational time of the model. For each full revolution of a kite, a new ring is added to the wake. The induction is then calculated and the propagation speed of the rings is modified accordingly. The model developed in the following can be used to describe the induction at different stages of the wake development. It is therefore used to analyse induction at the beginning of the reel-out phase. Furthermore, the power production during this stage is considered, specifically addressing the optimal length of the reel-out phase in terms of induction. It was found that shorter reel-out times lead to overall higher power production. The model also takes into account that the tether length of a single-kite AWES increases during the reel-out phase. This results in a larger radius of rotation and increased tether drag, which also affects power production. For dual kites, a significantly higher induction was found for otherwise identical kite parameters.
[Video, Sep. 2023] - Reverse Pumping: How (not) to launch a Rotokite
[Thesis, Aug. 2023] - Paul Krüger: Systemidentification of a Reverse Pumping Rotokite
Abstract: In addition to CWP, AWES represent a possibility for low CO2 energy production. Unlike conventional power plants, airborne wind turbines rely on continuous wind to maintain their altitude. Landing and launching these power plants poses a safety risk and may be economically inefficient. In this work, a mechanism is investigated that allows a rotor-AWES to maintain the desired altitude even in the absence of wind, thus eliminating the need for frequent launching and landing.
By pulling on the connection between the AWES and the ground station, energy is added to the flying object. The additional energy can then be converted into potential energy, allowing the flying power plant to regain altitude. This mechanism will be referred to below as ’reverse pumping’.
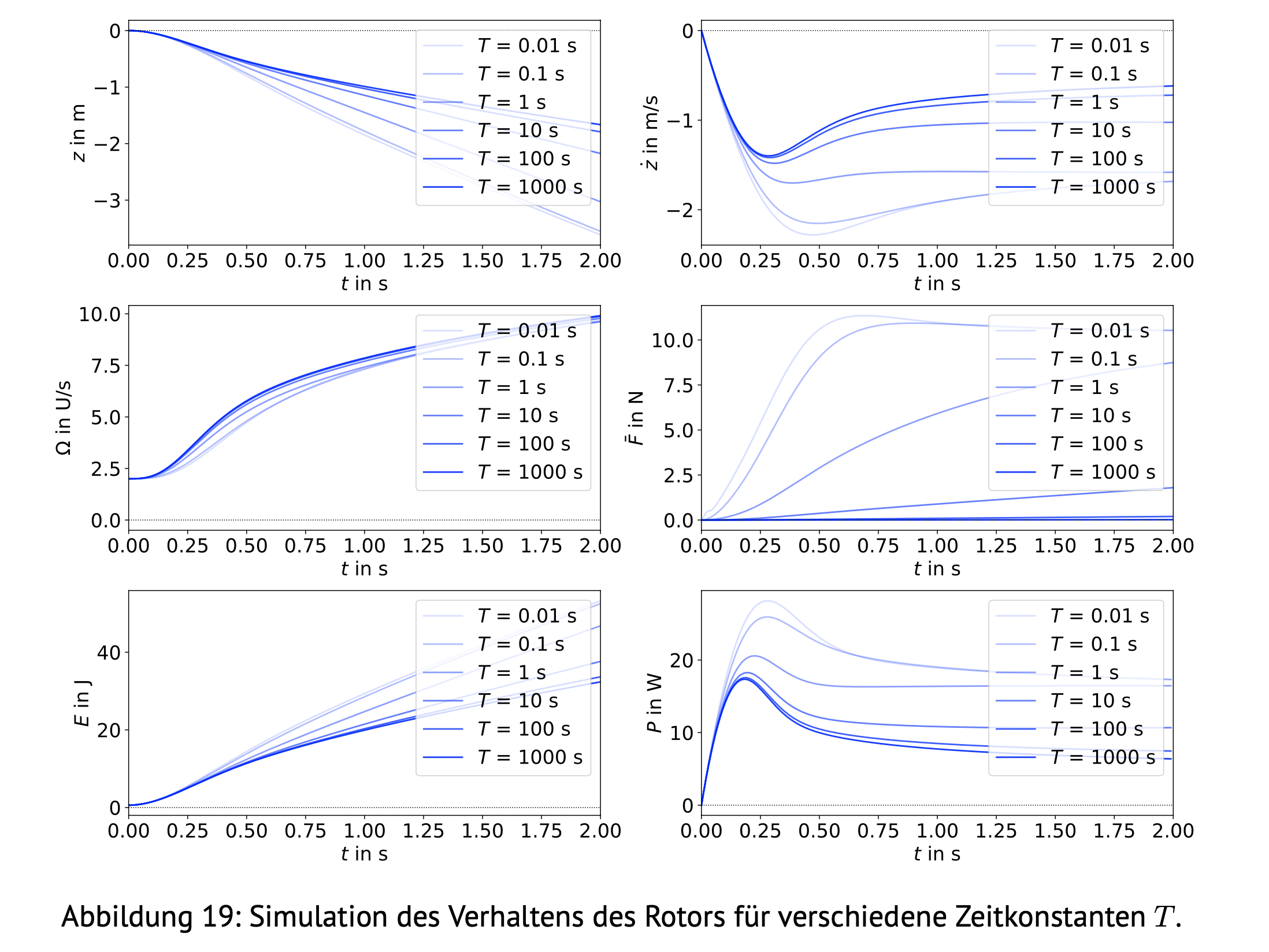
The objective of this paper is to analyze the pumping mechanism. Several models are de- rived to describe the behavior of the airborne wind turbine. The contribution of this work is to develop the most accurate and at the same time efficient model possible. The models are used to find an optimal control of the flying object during the pumping process. Finally, the models are compared in terms of accuracy and efficiency.
It can be seen that the most simplified of the derived models deviates only slightly from the most accurate model for many scenarios. The cost per evaluation is two orders of magnitude lower for this model. A control was found that can be used to implement the pumping mechanism. However, strong forces act on the flying object during the process, which can lead to complications in practice.
[Video, Jul. 2022] - Cyclic Pitch Control: Pitch Amplitude Visualized
[Video, Jul. 2022] - Cyclic pitch control for Rotary Airborne Wind Energy System
[Thesis, Sep. 2021] - Daniel Unterweger: Cyclic Pitch Control of a Rotary Kite

Abstract: Airborne wind energy (AWE) systems need to generate an uplifting force in order to reach altitude. For rotary kite systems this is often done using a dedicated lifting kite where the rotary kite is attached to. The lifting kite is undesired since it has a limited operating region and makes the system hard to maneuver. One approach to eliminating the lifting kite is to use a cyclic pitch mechanism on the rotary kite. In this thesis it is investigated how this approach can be used to control the altitude of a rotary kite. A rotation compensation control is implemented and characterized. The aerodynamic effects that the cyclic pitch steering has on the rotor forces are studied. For this purpose, experiments using a rotary kite and a simplified rotor on a test rig are conducted. A simplified aerodynamic rotor model is obtained that describes the tilting moment of the rotor dependent on the rotational speed and controls. A model of the controlled overall AWE system is developed. Finally, the system is simulated to investigate its behavior under different working conditions. It is shown that a simple PID controller is able to compensate the rotary motion of a rotary kite. The magnitude of the tilting moment on the rotor can be approximated to depend linearly on the cyclic pitch amplitude and quadratically on the rotational speed. From the performed simulation it can be seen, that the overall system is capable of keeping a predefined altitude and compensate wind fluctuations under certain conditions.
[Publication, 2018] Optimal Control of a Rigid-Wing Rotary Kite System for Airborne Wind Energy
J. De Schutter, R. Leuthold, M. Diehl, Proceedings of the European Control Conference (ECC) (2018)
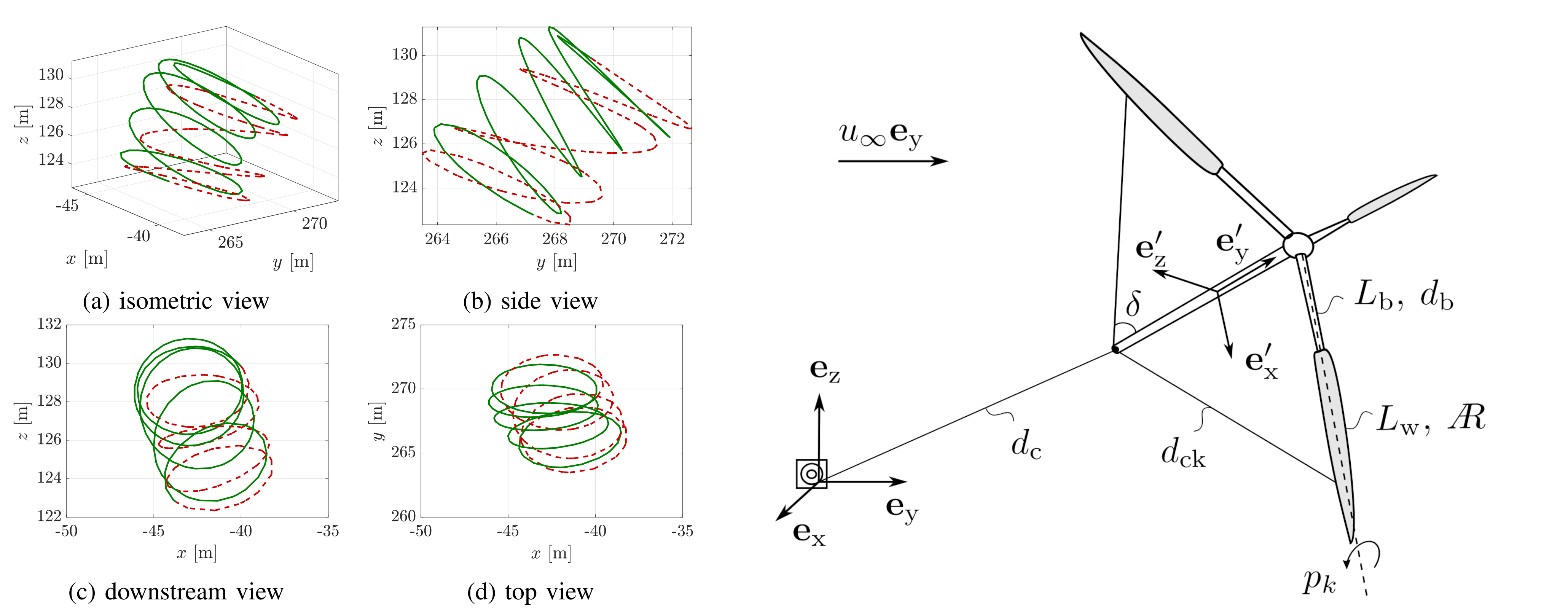
Left: Optimal reel-out (solid) and reel-in (dash) trajectories of the tip of wing. Right: Conceptual sketch and main parameters of the considered rigid-wing pumping RAWES configuration.
Abstract: Multiple-kite airborne wind energy (AWE) systems are typically characterized by unstable and highly nonlinear dynamics which often translates to intricate controller design and challenging coordination problems. Rotary kite AWE systems (RAWES) have been alternatively proposed for small-scale applications, under the assumption that they can reduce the complexity of the control problem. This paper confirms that a small, rigid-wing RAWES in pumping mode can be controlled effectively in a large operational range, using only pitch control as on-board actuation. Optimal control is applied to compute RAWES pumping trajectories in different operating regions, for a design geometry that is optimized for a rated wind speed under structural constraints. The reduced control complexity comes at the cost of a low harvesting factor, close to that of conventional wind turbines.